

 Les schémas ci-dessous montrent l’intégralité des installations possible entre des
instruments et un ordinateur où le Multiplexeur NMEA joue un rôle prépondérant.
Dans chaque cas l’objectif reste le même : combiner toutes les données des instruments
en un seul flux qui sera ensuite transmis à un ordinateur, un traceur, un répétiteur, un
pilote automatique, etc.
Il y a de nombreuses applications au multiplexeur. Dans le document qui suit nous nous
concentrerons sur la combinaison des données NMEA vers un ordinateur.
Les schémas ci-dessous montrent l’intégralité des installations possible entre des
instruments et un ordinateur où le Multiplexeur NMEA joue un rôle prépondérant.
Dans chaque cas l’objectif reste le même : combiner toutes les données des instruments
en un seul flux qui sera ensuite transmis à un ordinateur, un traceur, un répétiteur, un
pilote automatique, etc.
Il y a de nombreuses applications au multiplexeur. Dans le document qui suit nous nous
concentrerons sur la combinaison des données NMEA vers un ordinateur.Pour la croisière : la connexion du GPS est la plus importante car la position du navire est requise pour les logiciels de navigation et les traceurs, mais aussi les logiciels offrent de plus en plus de fonctions qui requièrent les données des autres instruments.
Par exemple, il est fort utile en navigation de pouvoir lire la profondeur ou la direction du vent à la position du navire pointée sur la carte numérique.
La majorité des logiciels peuvent afficher ces données dans des fenêtres prévues à cet effet comme des répétiteurs, sous un format analogique, digital ou même graphique.
Le graphique de la force du vent peut jouer un rôle important dans la prise de décision. L’enregistrement automatique des données par les logiciels, à intervalles définis par l’utilisateur, permet également de constituer un livre de bord contenant les données de position, cap, vitesse, force et direction du vent.
Pour exploiter au mieux les possibilités offertes par un ordinateur, toutes les données NMEA disponibles à bord doivent être transmises à l’ordinateur à travers un multiplexeur NMEA.
Pour le régatier : d’autres programmes aident à déterminer les meilleures routes ou bords.
Encore une fois, toutes les données de l’instrumentation doivent être accessibles pour être exploitées par les calculs de ces logiciels.
Toutefois, après avoir décidé de monter un système de connexion Instruments/Ordinateur, il est important d’effectuer les branchements de telle façon que l’objectif soit atteint. Si la base du système n’est pas correctement conçue, cela ne fonctionnera pas, même avec le meilleur des logiciels.
Un point important quand il s’agit de planifier l’interconnexion des instruments avec l’ordinateur est de considérer si un pilote automatique fera partie du système et quelles fonctions du pilote seront utilisées.
La plupart des pilotes automatiques peuvent être utilisée de trois façons :
1. Mode “Compas” : Le navigateur suit un cap au compas et presse le bouton “auto” du pilote. Le pilote automatique maintiendra alors le cap compas. C’est la manière la plus simple d’utiliser un pilote et aucune autre donnée d’instrument n’est requise.
2. Mode “Route” : Le bateau suit une route vers un waypoint qui représente la destination finale. L’avantage est que le bateau suit non seulement la bonne direction, mais qu’il suit exactement la route que le navigateur a tracée jusqu’au waypoint, en évitant par exemple certains dangers.
C’est l’idéal pour une navigation sans visibilité, car comme la route est tracée sur le fond, le pilote automatique compense automatiquement la dérive et le courant. Dans cette situation le pilote fait souvent une meilleure route que le barreur.
3. Mode “Vent” : Le bateau est orienté par rapport à la direction du vent apparent à un angle défini. Ce mode est utile pour maintenir le réglage des voiles mais si la direction du vent change, la route change également.
La plupart des pilotes automatiques donneront l’alarme si le changement est supérieur à un angle prédéfini par le navigateur.
Pour pouvoir travailler en mode “Route”, le pilote automatique a besoin de phrases NMEA spécifiques donnant le relèvement et la distance entre la position actuelle et le point de destination, et l’erreur d’écart de route.
Un GPS peut fournir ces données, mais il est alors nécessaire d’enregistrer le waypoint dans le GPS et de le mettre en mode navigation. Dans un système intégré où la navigation est réalisée sur l’ordinateur, les waypoints sont positionnés avec la souris directement sur la carte numérique.
Cette méthode plus ergonomique, plus rapide et moins source d’erreur est l’un des avantages de l’ordinateur. Le GPS est alors seulement utilisé pour fournir la latitude et la longitude de la position. Par conséquent, au lieu de connecter le pilote automatique au GPS, il est branché sur l’ordinateur et le logiciel de navigation génère lui-même les phrases NMEA interprétées par le pilote.
Quand vous choisissez un logiciel de navigation, il est important de savoir si la fonction de contrôle du pilote automatique est implémentée.
Dans le mode “Vent”, le pilote a besoin des données NMEA de la girouetteanémomètre.
Cependant, si il est connecté à l’ordinateur pour recevoir ces données, une connexion directe à la girouette n’est pas possible en même temps.
Par conséquent, le logiciel de navigation doit être capable de transmettre les données de la girouette qu’il reçoit sur la sortie où le pilote automatique est connecté.
Naturellement, les données du vent doivent être disponibles en premier lieu dans l’ordinateur.
Dans les paramètres de configuration du logiciel de navigation, l’utilisateur doit pouvoir spécifier quelles sont les données NMEA transmises sur la sortie.
Dans la plupart des cas la même sortie de l’ordinateur sera connectée au pilote et au multiplexeur NMEA. Le pilote requiert une transmission de données à 4800bps (NMEA standard).
Comme la vitesse de transmission et de réception pour le port du PC doivent être la même, cela implique que le port d’entrée de l’ordinateur et par conséquent la sortie du multiplexeur NMEA devront être fixés à 4800bps.
SCHEMA 1

SCHEMA 2
SCHÉMA DE CONNECTEUR RS 232

SCHEMA 3
SCHEMA 4
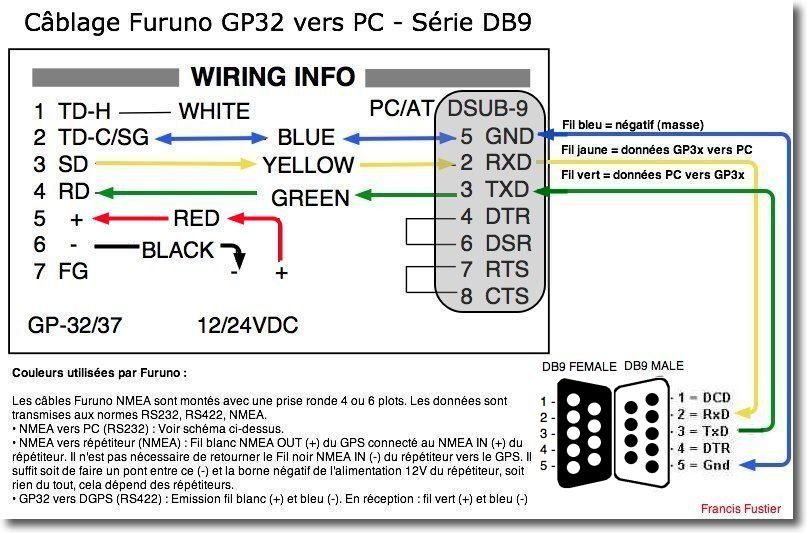
SCHÉMA DE CONNEXION DE GPS FURUNO GP_32
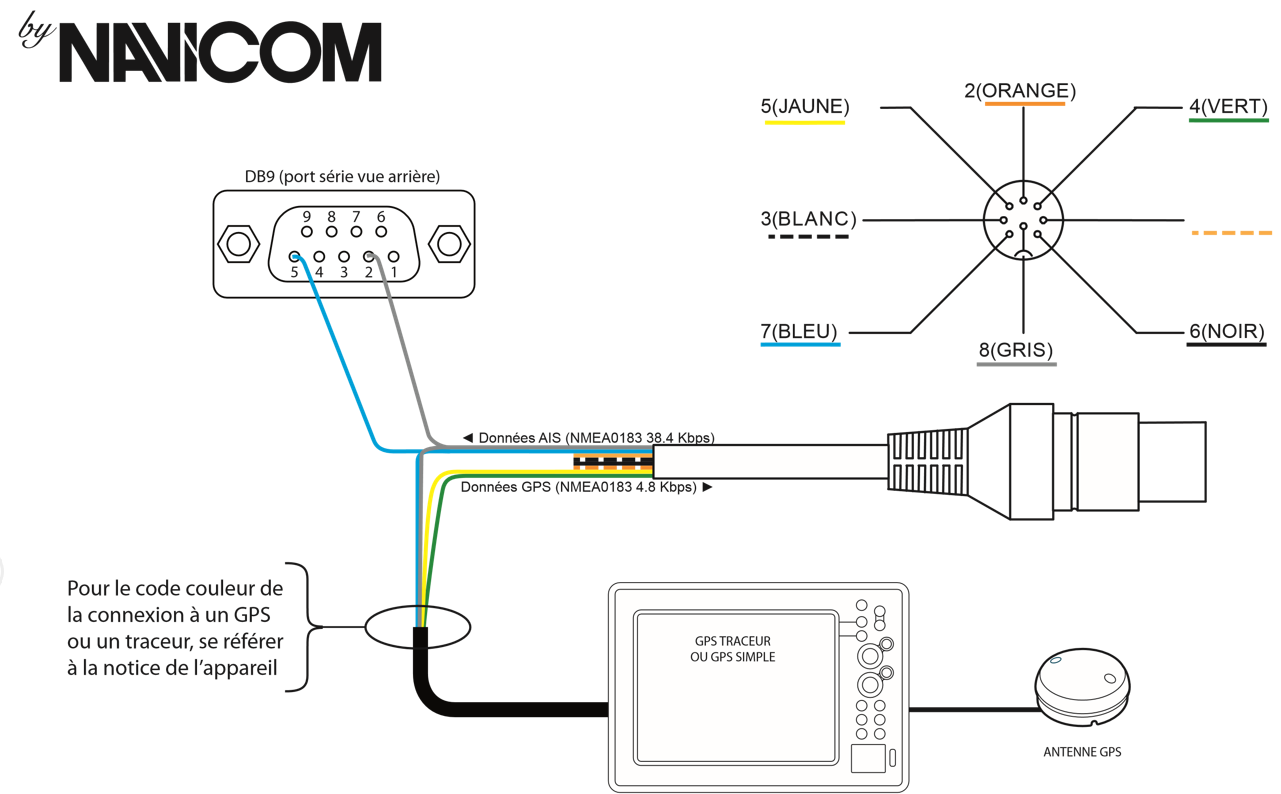
SCHEMA 5